Trong đời sống, có nhiều việc nặng nhọc và nguy hiểm như nạo vét đường ống cống hay tháo gỡ bom mìn, hoặc những việc phải làm nơi địa hình khó khăn hiểm trở như dưới biển sâu hay trên vùng Bắc cực lạnh giá…Khi đó, các robot, đặc biệt là loại robot di động có khả năng tùy biến cao sẽ là nguồn lực hỗ trợ đắc lực.
Thế nào là robot di động?
Robot là một loại thiết bị có thể thực hiện những công việc một cách tự động bằng sự điều khiển của máy tính hoặc các vi mạch điện tử được lập trình. Robot có một số trong các đặc điểm sau đây: do con người sáng tạo ra, có khả năng nhận biết môi trường xung quanh và tương tác với những vật thể trong môi trường, có khả năng đưa ra các lựa chọn dựa trên môi trường và được điều khiển một cách tự động theo những trình tự đã được lập trình trước, có thể điều khiển được bằng các lệnh để có thể thay đổi tùy theo yêu cầu của người sử dụng, có thể di chuyển quay hoặc tịnh tiến theo một hay nhiều chiều và khéo léo trong vận động.
Robot di động là loại robot có thể thực hiện các tác vụ ở các địa điểm khác nhau, không ở cố định một vị trí nào. Khác với robot cố định, robot di động có những yêu cầu cao hơn, đòi hỏi đầu tư nhiều hơn. Trong khi robot cố định vận hành khá đơn giản, chỉ cần không gian cố định để thực các công việc lặp đi lặp lại, còn hệ thống robot di động hoạt động trong không gian mở, thay đổi liên tục và đôi khi rất phức tạp. Linh động là đặc tính của robot di động, có thể có được từ các bộ phận chuyển động như bánh xe, chân, tay, cánh quạt… Robot di động “phải biết” định vị và “thu nhận” được thông tin đầy đủ về môi trường xung quanh, sau đó mới có quyết định thực hiện hành động nào cho phù hợp.
Do đó, robot di động thường được tích hợp các cảm biến nhằm giúp cho chúng có thể nhận biết. Ngoài ra, robot di động còn có thể gắn kết với một hệ thống máy tính điều khiển và hệ thống cung cấp điện năng cho các chuyển động cũng như các cảm biến. Tùy vào tính chất công việc, các robot di động có thể phải mang theo nguồn điện, camera, micro, bộ cảm biến và các bộ xử lý. Tuy nhiên, do các robot di động đều có một tải trọng nhất định, nên khi thiết kế, cần tính toán trọng lượng các vật mang theo này ở mức vừa phải. Một đặc điểm quan trọng khác nữa là các robot di động cần phải có tính tự động một cách tương đối, nghĩa là phải có khả năng tự làm một hành động nào đó mà không cần có sự can thiệp của con người.
Robot di động mô phỏng con gián tại triễn lãm The Zoo tại Trung tâm InterAcess năm 2007. Nguồn: Gord Fynes/Flickr | | 
Robot lau nhà. Nguồn: Eric Olson/Flickr |
Các loại robot di động và ứng dụng
Cấu tạo của một robot di động có thể đơn giản hoặc rất phức tạp. Cơ bản, một robot di động đơn giản bao gồm một bộ phận chuyển động như bánh xe hoặc cánh tay, một bộ nguồn và lớp vỏ ngoài.

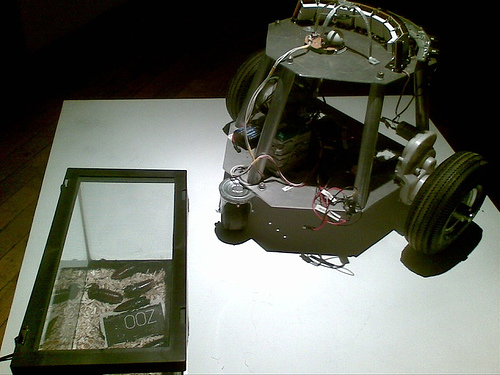
Cấu tạo bên ngoài của một con robot di động đơn giản chỉ bao gồm:
bánh xe và bộ khung. Nguồn: Nick Ames/Flickr
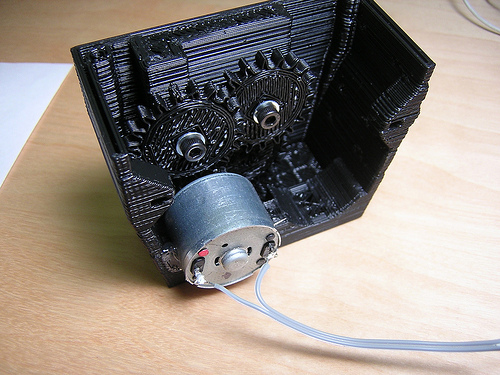
Cấu trúc bên trong của robot di động đơn giản bao gồm:
bánh xe, motor và dây nguồn điện. Nguồn: Nick Ames/Flickr
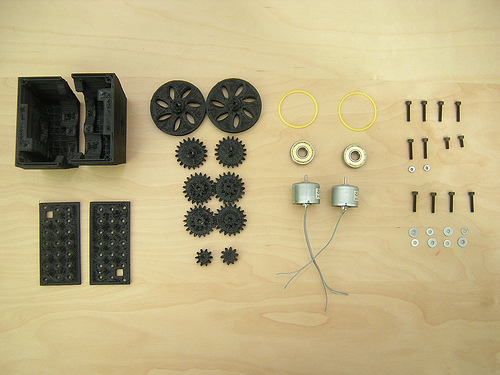
Các bộ phận riêng rẽ của robot di động đơn giản bao gồm:
vỏ hộp, bánh răng, motor, ốc vít. Nguồn: Nick Ames/Flickr
Có thể phân loại robot di động dựa vào môi trường làm việc của chúng, bao gồm trên không, dưới nước và trên đất liền. Ở mỗi nơi, robot cần một hệ thống truyền động khác nhau.
Đối với robot di động trên không, các bộ phận chuyển động là cánh quạt hay cánh bay và động cơ; với robot di động dưới nước, tùy thuộc vào nơi làm việc trên hay trong mặt nước mà sẽ có cấu trúc truyền động khác nhau: làm việc trên mặt nước, bộ phận chuyển động là phao hoặc động cơ với bộ phận điều khiển, hoạt động sâu dưới nước, bộ phận chuyển động có thể là chân hoặc có thể là cả động cơ phản lực; robot di động trên cạn có bộ phận chuyển động khá đa dạng, phụ thuộc vào địa hình hoạt động mà bộ phận chuyển động có thể là chân, bánh xe, bánh xích hay là loại kết hợp. Phổ biến nhất là robot di chuyển bằng bánh xe.
Robot di động ứng dụng cho rất nhiều loại công việc khác nhau từ xây dựng đến nông nghiệp, từ đào mìn đến thăm dò dầu khí, xử lý môi trường, y tế, giải trí, vận chuyển,…
Robot có khả năng giúp rất nhiều trong những công việc mà con người không thể làm. Tuy nhiên, vẫn có khả năng xảy ra những sự cố đáng tiếc, nhất là đối với những robot giúp việc nhà hay hỗ trợ những việc trong sinh hoạt hàng ngày, bởi vì robot có thể bị mất kiểm soát khi các linh kiện trong hệ thống bị bất ngờ gặp trục trặc ngoài tầm kiểm soát.
Nghiên cứu robot di động dưới góc nhìn sáng chế
Một trong những nhà sáng chế (SC) robot đầu tiên đó là Leona Da Vinci (họa sĩ tài danh người Ý), ông đã tạo ra một robot có hình dạng giống như người nhằm chứng tỏ cơ thể con người hoàn toàn có thể mô phỏng lại được.
Năm 1956, Engelberger (kỹ sư người Mỹ) xây dựng công ty sản xuất robot đầu tiên có tên là Unimation nhằm sản xuất những robot công nghiệp đầu tiên dựa trên SC của George Devol. Năm 1961, họ cho ra đời robot đầu tiên có tên là Unimate. Với thành công này, Engelberger được xem là cha đẻ của robot học.
Shakey là robot di động đầu tiên có thể suy luận hoạt động của nó, do Trung tâm Trí tuệ nhân tạo của SRI (nay là Viện Nghiên cứu Stanford, Menlo Park, California) phát triển từ năm 1966 cho đến năm 1972. Shakey là nền tảng và có ảnh hưởng to lớn đến trí thông minh nhân tạo và khoa học robot ngày nay.
Đến nay có rất nhiều nghiên cứu về robot để ứng dụng trong hầu hết các lĩnh vực đời sống con người. Phân tích dựa trên dữ liệu SC tiếp cận được, hiện nay có khoảng 5600 SC về robot di động trên thế giới. Trong đó, số lượng SC đăng ký tại Mỹ, nơi được xem là cái nôi của robot di động chỉ có 835 SC, Trung quốc lại là nước dẫn đầu với 1.957 SC, Nhật đứng thứ hai với 1.294 SC. Hàn Quốc cũng là một các quốc gia lọt vào top 5 với 787 SC.
Các SC về robot di động phát triển mạnh mẽ trong thời gian gần đây. Đặc biệt là năm 2012 là năm có lượng SC tăng cao nhất với 544 SC. Riêng năm 2014, đã có 120 SC được đăng ký. Một số SC đăng ký mới đây có thể kể đến như US2014-0207281 về hệ thống giám sát và quản lý môi trường có sử dụng robot di động hay US2014-0200713 về phương pháp vận hành robot di động để mở cửa.
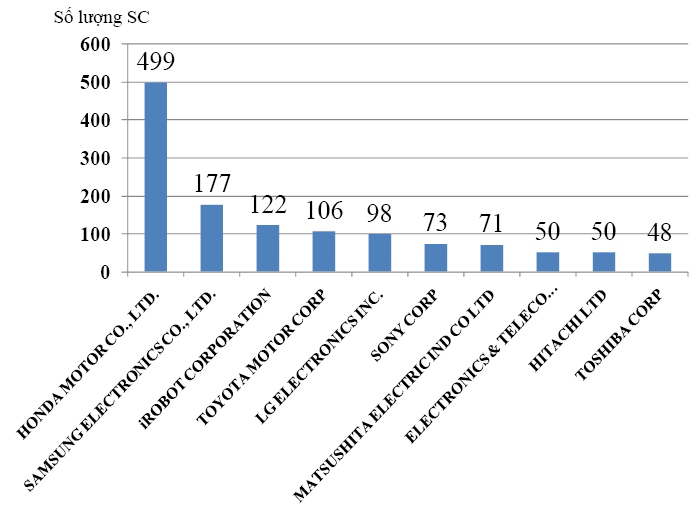
Hiện có rất nhiều công ty chuyên về sản xuất robot trên thế giới. Theo Robotic Business Review thì trong 50 công ty về robot lớn nhất thế giới, hầu hết các công ty này có xuất xứ từ Mỹ như iRobot, Kuka robotics, Ekso Bionics… Ngoài ra, đại diện của châu Á có các công ty đến từ Nhật như Honda Robotics, Panasonic hay Foxconn Technology group đến từ Đài Loan. Công ty có số lượng SC về robot nhiều nhất là Honda với 499 SC, kế đến là Samsung: 177 SC, iRobot của Mỹ đứng thứ ba với 122 SC.
TOSY Robotics là một công ty Việt Nam chuyên về những sản phẩm robot và đồ chơi công nghệ cao, đã có nhiều đăng ký SC liên quan đến robot tại nhiều quốc gia trên thế giới. Trong CSDL Wipsglobal, có 21 SC và kiểu dáng công nghiệp được TOSY Robotics đăng ký tại các nước như Mỹ, Trung Quốc, Hàn Quốc, Canada và EU. Các sản phẩm của TOSY đã được xuất khẩu đi hơn 60 quốc gia trên thế giới.
Các quốc gia có nhiều đăng ký SC về robot di động

Nguồn: HM- Wipsglobal.
Phát triển đăng ký SC về robot di động trên thế giới
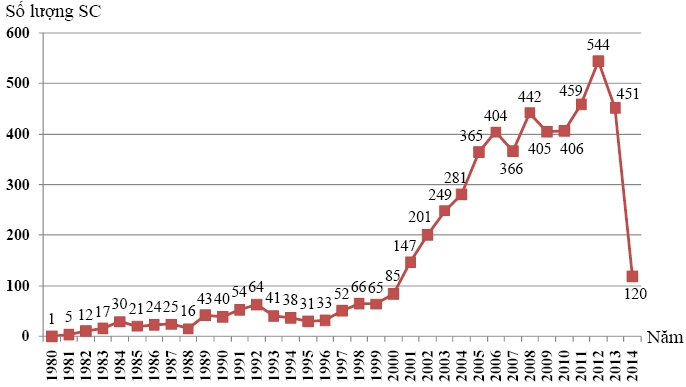
Nguồn: HM- Wipsglobal
Top 10 công ty có nhiều SC về robot di động
Nguồn: HM- Wipsglobal
Nghiên cứu và ứng dụng robot di động tại Việt Nam
Nghiên cứu robot di động đã bắt đầu rất sớm tại TP. HCM, từ ít nhất 15 năm trước. Khoa Cơ khí, Trường Đại học Bách Khoa là một trong những đơn vị tiên phong với công trình robot di động tập trung vào việc tránh vật cản. Hiện nay, trường đại học này đã có đến 4 nghiên cứu về robot di động phục vụ công nghệ hàn, các sản phẩm đầu ra của những nghiên cứu này bao gồm robot hàn di động hàn đứng và hàn trần, robot di động hàn đường thẳng. Các robot này chuyển động theo đường ray hoặc chuyển động bám theo đường hàn. Có dự án đã sản xuất ra robot di động và cung cấp cho Xí nghiệp Đóng tàu Sài Gòn. Đại học Bách Khoa TP. HCM đang triển khai thiết kế robot giống người tại Phòng Thí nghiệm trọng điểm.
Ứng dụng trong hệ thống lưu kho và cấp phát vật tư có đề tài nghiên cứu cấp Nhà nước tại Khu Công nghệ Cao TP. HCM do TS. Dương Minh Tâm chủ trì, đã thiết kế các robot để vận chuyển linh kiện từ kho đến vị trí lắp ráp.
Lĩnh vực y tế, Hội Tự động hóa TP. HCM đã có đề tài về robot di động phục vụ y tế, dùng để tương tác với bệnh nhân bị cách ly, năm 2005. Robot này sẽ di chuyển theo các dải băng cố định trên sàn nhà, mang theo hệ thống camera và micro để theo dõi và thu nhập dữ liệu từ bệnh nhân, sau đó truyền về máy vi tính trung tâm qua hệ thống vô tuyến.
Lĩnh vực an ninh, dự án robot di động tháo gỡ bom mìn đã được triển khai năm 2009, do Trung tâm Nghiên cứu và Chuyển giao công nghệ (Sở KH&CN TP. HCM) chủ trì. Robot này có hệ thống điều khiển và camera để người điều khiển có thể đưa robot tới vị trí cần thiết và thực giện các thao tác tháo gỡ bom mìn.
Ứng dụng robot di động phục vụ vệ sinh môi trường đã được hai trường đại học kỹ thuật hàng đầu tại TP. HCM là Đại học Bách khoa và Đại học Sư phạm Kỹ thuật thực hiện hai công trình vào năm 2011 về robot di động kiểm tra đường ống thoát nước và robot làm vệ sinh ống khói.
Ngay cả robot di động trên không cũng đã được nghiên cứu tại TP. HCM. Năm 2006 – 2007, TS. Nguyễn Tấn Linh phối hợp Sở Khoa học và Công nghệ TP.HCM đã thiết kế chế tạo bộ lái tự động cho mô hình máy bay lên thẳng trên cơ sở ứng dụng thiết bị vệ tinh GPS. Cũng trong khoảng thời gian này, kỹ sư Lê Công Danh đã nghiên cứu thiết kế và chế tạo loại máy bay nhỏ có khả năng tự cân bằng và chụp không ảnh, quan sát trên không. Năm 2011, TS. Nguyễn Anh Thi, tại Đại học Quốc gia TP. HCM đã triển khai đề tài nghiên cứu mẫu máy bay trực thăng 4 cánh quạt tự động bay theo chương trình.
Robot đã được nghiên cứu ở hầu hết các quốc gia trên thế giới.Tại Việt Nam, ngày càng có nhiều đề tài nghiên cứu về robot, cũng như những thành tích mà sinh viên các trường đại học đã đạt được qua các kỳ thi về robot trong và ngoài nước cho thấy việc phát triển robot rất được quan tâm. Tuy nhiên, hiện nay mức độ ứng dụng của các robot sau khi nghiên cứu không nhiều, đa số các đề tài chỉ dừng lại ở nghiên cứu mô hình hoặc ứng dụng một thời gian ngắn, chưa được tiếp tục phát triển thành sản phẩm.
HOÀNG MI, STINFO Số 10/2014
Tải bài này về tại đây.