Theo cơ sở dữ liệu sáng chế tiếp cận được, hầu hết đăng ký sáng chế robot ở Việt Nam tập trung mảng robot công nghiệp, trong khi xu hướng nghiên cứu thế giới đã chuyển sang dạng robot tương tác phục vụ con người. Còn quá nhiều rào cản về tài chính, hạ tầng kỹ thuật và công nghiệp phụ trợ đang kìm hãm tiềm năng của các nhà sáng tạo robot trong nước. Tuy nhiên, từ những sân chơi chế tạo robot quốc tế như Robocon châu Á Thái Bình Dương, một thế hệ các nhà sáng chế trẻ đang hình thành, có cả trí tuệ, sự bén nhạy với thị trường và khát khao về những robot mang thương hiệu Việt.
| 2/7 sáng chế robot được giới thiệu trong bài viết dưới đây là của anh Hồ Vĩnh Hoàng, một cựu thành viên đội Robocon Đại học Bách khoa Hà Nội năm 2003 nay đã trở thành Tổng giám đốc Công ty Cổ phần Robotics Tosy (Hà Nội). Nhiều sản phẩm của Tosy đã thâm nhập vào các quốc gia hàng đầu về robot như Mỹ, Nhật với giá cả chỉ bằng 1/3 sản phẩm cùng loại tại các nước phát triển. Những cuộc thi sáng chế như Robocon đang ấp ủ giấc mơ lớn về một nền công nghiệp robot phát triển cho Việt Nam. | | 
Robot đánh bóng bàn “Topio-robot”, sản phẩm của Công ty Tosy giới thiệu tại Triển lãm Robot quốc tế IREX năm 2007 tại Nhật Bản. |
| |
Robocon là cuộc thi chế tạo robot dành cho sinh viên châu Á được Hiệp hội Phát thanh Truyền hình châu Á Thái Bình Dương – ABU (Asia-Pacific Broadcasting Union) tổ chức thường niên từ năm 2002. Cuộc thi do Nhật Bản khởi xướng nhằm cổ vũ phong trào sáng tạo robot của thanh niên các trường đại học và cao đẳng kỹ thuật. Tên gọi Robocon ghép từ hai chữ “Robot” và “Contest”, tạm dịch là "Cuộc thi Robot".
| |
 | | | |
Robocon 2014 sẽ tổ chức tại Pune, Ấn Độ vào tháng 8/2014 với chủ đề “Gia đình robot” gần gũi và đầy ý nghĩa. Sau 13 năm, đây vẫn là sân chơi giáo dục bổ ích thuộc lĩnh vực cơ khí-tự động hóa lớn nhất dành cho sinh viên các nước trong khu vực châu Á.
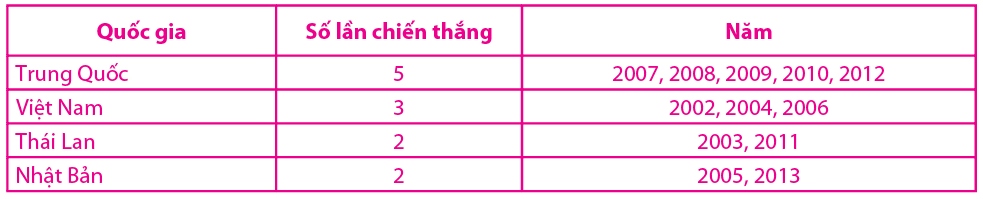
Các quốc gia và số lần vô địch Robocon từ năm 2002 -2013
 | | | | | | |
Hệ thống làm sạch bề mặt kim loại dạng tấm/vỏ bằng robot trong nhà bạt lắp ghép
Số công bố đơn: 1484; ngày nộp đơn: 29/01/2013 tại Việt Nam; tác giả: Chu Anh Mỳ, Nguyễn Đức Anh, Lưu Tiến Mạnh, Nguyễn Sỹ Khánh Linh, Triệu Quốc Lộc, Nguyễn Anh Tuấn, Vũ Minh Đức, Hà Huy Hưng; đơn vị nộp đơn: Viện Nghiên cứu Khoa học kỹ thuật Bảo hộ lao động; địa chỉ: 99 Trần Quốc Toản, quận Hoàn Kiếm, TP. Hà Nội.
Trong ngành công nghiệp đóng tàu, quá trình xử lý bề mặt các tấm kim loại hoặc vỏ tàu trước khi hàn, ghép, phun sơn rất quan trọng và tốn nhiều công lao động. Giải pháp hữu ích đề cập đến hệ thống làm sạch vỏ tàu hoặc các kim loại dạng tấm bằng robot phun cát di động trong nhà bạt lắp ghép.
Kết cấu hệ thống gồm: cổng trục có nhiệm vụ nâng, đặt và định vị các tấm kim loại cần phun cát lên xe (xe chở tấm kim loại ra vào nhà bạt); nhà bạt phun cát tháo lắp được; vòi phun cát nối trực tiếp với bunke (thùng chứa dạng phễu) cấp trộn cát và khí nén; và robot phun cát có đầu gắn vòi phun cát.
Robot phun cát cấu thành từ các module có chức năng hoạt động tương đối độc lập:
• Module di chuyển: gồm xe di chuyển bằng bánh lốp và bộ vi điều khiển được lập trình trước để điều khiển xe tự động.
• Module công tác: gồm tay máy có thể điều khiển từ xa nhờ bộ điều khiển trung tâm và thiết bị điều khiển từ xa (nằm ngoài robot) kết nối không dây với nhau.
• Module quan sát-định vị: gồm cụm định vị và cụm quan sát. Cụm định vị là các cảm biến xác định khoảng cách và cụm quan sát là camera không dây truyền tín hiệu hình ảnh về thiết bị điều khiển từ xa. Module này giúp quá trình điều khiển robot bằng tay thuận lợi, đồng thời giám sát quá trình làm việc tự động của robot chặt chẽ hơn.
Robot phun cát theo sáng chế có thể tự động di chuyển và phun cát theo quỹ đạo định trước hoặc điều khiển bằng tay để làm sạch bề mặt tấm kim loại. Luồng cát lẫn không khí dưới áp suất cao giúp đánh bật các vật bám trên bề mặt kim loại. Việc thay thế robot vào công đoạn phun cát góp phần cải thiện điều kiện làm việc và sức khỏe người lao động.
Robot hinh cầu
Số bằng sáng chế: 1-0010195; cấp ngày: 11/04/2012 tại Việt Nam; tác giả và chủ bằng: Hồ Vĩnh Hoàng; địa chỉ: Số 7, ngõ 538, đường Láng, quận Đống Đa, TP. Hà Nội.
Sáng chế đề cập tới robot hình cầu có khả năng di chuyển bằng cách lăn theo các hướng tiến, lùi, rẽ trái, rẽ phải…, được sử dụng làm đồ chơi trẻ em.
| Kết cấu robot gồm:
• Vỏ robot: có hình cầu, để di chuyển bằng phương pháp lăn.
• Bộ phận cơ - điện tử: để điều khiển và kiểm soát hoạt động của vỏ hình cầu, gồm bảng mạch, động cơ một chiều, bánh ma sát, cụm cơ cấu đỡ và quả đối trọng. Bộ phận cơ - điện tử được lắp bên trong vỏ hình cầu sao cho bánh xe ma sát và cụm cơ cấu đỡ tiếp xúc với mặt trong của vỏ hình cầu. | |  |
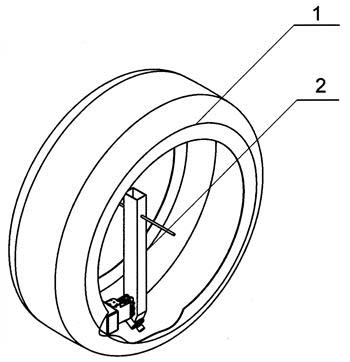
Robot bánh xe
Số bằng sáng chế: 1-0010066; cấp ngày: 15/02/2012 tại Việt Nam; tác giả và chủ bằng: Hồ Vĩnh Hoàng; địa chỉ: Số 7, ngõ 538, đường Láng, quận Đống Đa, TP. Hà Nội.
| Sáng chế đề cập tới robot hình bánh xe có kết cấu gồm vỏ lốp xe và bộ phận cơ - điện tử. Bộ phận cơ - điện tử có nhiệm vụ điều khiển hoạt động của vỏ lốp xe, gồm phần thân chính, bộ phận lái, động cơ dẫn động, bánh xe ma sát và quả đối trọng. Một đầu của bộ phận cơ - điện tử được lắp với trục của vỏ lốp xe; còn đầu kia tiếp xúc với mặt trong của vỏ lốp xe thông qua bánh xe ma sát.
Robot bánh xe theo sáng chế có khả năng lăn tiến, lùi, rẽ trái và rẽ phải như kiểu lăn bánh xe của các loại xe thông thường.
| |  |
Robot di chuyển ô tô
Số công bố đơn: 27865; ngày nộp đơn: 11/08/2011 tại Việt Nam; tác giả: Nguyễn Quang Huy; đơn vị nộp đơn: Công ty TNHH Giải pháp Công nghệ Trí Việt; địa chỉ: Số 22 Cửa Nam, quận Hoàn Kiếm, TP. Hà Nội.
Sáng chế đề cập đến robot giúp di chuyển ôtô, kết cấu gồm khung đỡ xe và các cụm truyền động.
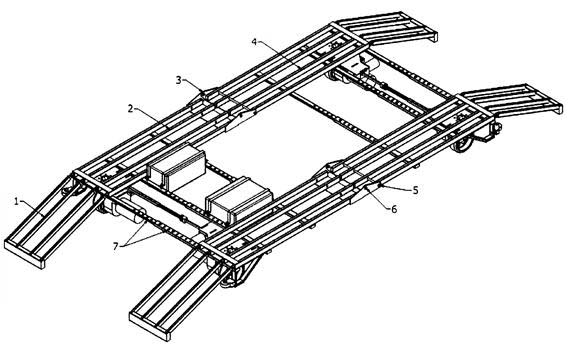
• Khung đỡ xe: được làm từ các thanh thép hộp, gồm hai nửa có thể gấp lại nhờ các khớp nối, chốt xoay, chốt định vị. Ở hai đầu khung có các đoạn dốc nghiêng giúp ôtô lên xuống. Các đoạn này xếp gọn trong lòng khung và kéo ra khi dùng.
• Các cụm truyền động: dẫn động cho robot; gồm bánh xe, động cơ truyền động, động cơ lái, cụm bánh răng, thanh răng và thanh dẫn hướng thanh răng.
Robot được điều khiển từ xa và có thể vận hành tự động.
Robot dạng tay quay hồi chuyển và thiết bị cắt/lấy khay hàng tự động sử dụng robot này
Số công bố đơn: 1921; ngày nộp đơn: 23/03/2011 tại Việt Nam; tác giả: Nguyễn Thiện Toàn, Đường Minh Tâm; đơn vị nộp đơn: Trung tâm Nghiên cứu Triển khai Khu Công nghệ cao; địa chỉ: Lô I3, đường N2, Khu Công nghệ cao TP.HCM.
Giải pháp hữu ích đề cập đến robot cất/lấy hàng dạng tay quay hồi chuyển, sử dụng các khay hàng có bánh xe để di chuyển trên thanh ray dẫn đến các ô chứa hàng.
Giải pháp hữu ích này có khả năng ứng dụng chế tạo rộng rãi dạng robot S/R (robot nhận và xuất các vật tư, linh kiện) với thiết kế gọn nhẹ dùng trong kho hàng tự động của các siêu thị, bãi đỗ xe ô tô tự động, kho hàng chuyển phát nhanh; tiết kiệm năng lượng điện vận hành kho hàng trên 50% theo tính toán và kiểm nghiệm thực tế.
Hệ thống kết nối robot với kho ứng dụng
Số công bố đơn: 36715; ngày nộp đơn: 28/12/2012 tại Việt Nam; tác giả: Nguyễn Lâm Phương, Trương Gia Bình; đơn vị nộp đơn: Viện Nghiên cứu Công nghệ FPT; địa chỉ: Số 8 Tôn Thất Thuyết, Mỹ Đình huyện Từ Liêm, TP. Hà Nội.
Sáng chế đề cập đến hệ thống kết nối robot với kho ứng dụng. Trong hệ thống này robot có thể tải ứng dụng từ kho ứng dụng, đồng thời nhà cung cấp ứng dụng cũng có thể tải ứng dụng lên kho. Các vấn đề an toàn phát sinh của robot khi chạy ứng dụng được kiểm soát nhờ các tầng kiểm tra an toàn tại kho ứng dụng.
Robot bay
Số công bố đơn: 24018; ngày nộp đơn: 03/04/2009 tại Việt Nam; tác giả và người nộp đơn: Nguyễn Thiện Phúc; địa chỉ: Nhà 32 khu BT 1, Bắc Linh Đàm quận Hoàng Mai, TP. Hà Nội.
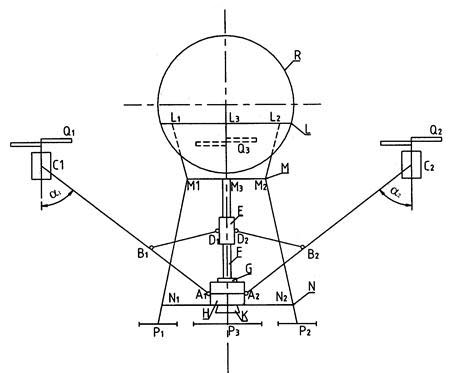
Robot bay đang là lĩnh vực được thế giới chú trọng bởi có ý nghĩa quan trọng trong lĩnh vực quốc phòng. Sáng chế đề xuất robot bay có thể truyền nhận thông tin với kết cấu gọn nhẹ, chỉ dùng ba động cơ kèm cánh quạt, lắp ở ba đỉnh tam giác đều trong kết cấu khung làm bằng sợi carbon. Chính giữa khung buộc chặt một quả khí cầu, có bộ điều khiển từ xa và cơ cấu đơn giản giúp chuyển hướng, chiều và tốc độ quay của cánh quạt. Nhờ đó có thể điều khiển các chuyển động cần thiết để robot bay, truyền và nhận thông tin.
MINH NHẬT, STINFO Số 5/2014
Tải bài này về tại đây.