“Chẳng máy móc nào thay thế được xúc giác”. Kết luận này sẽ đi vào quá khứ cùng thế kỷ 20. Công nghệ haptic “chạm và cảm nhận” đang tiếp cận với một trong năm giác quan của con người: xúc giác.
2014 là năm của công nghệ “chạm”. Nhờ các thiết bị cảm ứng thông minh, người ta có thể “chạm” để chụp ảnh, “chạm” để ghi âm, “chạm” để gõ vài dòng chia sẻ cảm xúc… Tưởng chừng công nghệ “chạm” có thể làm được mọi thứ nhưng vẫn còn thách thức lớn phải vượt qua. Đó là khả năng mô phỏng “cảm giác chạm”, tức xúc giác.
Để thấy được tầm quan trọng của việc tích hợp xúc giác vào công nghệ, hãy thử so sánh việc sử dụng điện thoại cảm ứng với điện thoại có phím. So với màn hình cảm ứng trơn, phẳng, dùng bàn phím dễ hơn và ít lỗi hơn bởi ta có thể sờ và cảm nhận nút bấm. Như vậy, bổ sung xúc giác cho máy móc không chỉ giúp tăng độ chính xác khi thao tác, cải thiện hiệu suất sử dụng mà còn nâng cao cảm giác thực cho người dùng.
Liệu các nhà khoa học có thể cải tiến thiết bị “chạm” bằng cách thêm vào yếu tố “cảm giác”? Liệu màn hình điện thoại có thể truyền tải cảm giác của những bề mặt khác nhau như gỗ hay đá, mềm mại hay gồ ghề…? Liệu chúng ta có thể cầm, nắm ảnh ảo 3D? Cốt lõi để hiện thực hóa những điều này là một công nghệ đang phát triển nhanh chóng – công nghệ “cảm ứng tương tác” hay còn gọi là “haptic”.
Thêm cảm giác cho công nghệ “chạm”
Haptic không chỉ là công nghệ “chạm”, haptic là “chạm và cảm nhận”.
Haptic là một thuật ngữ có nguồn gốc Hy Lạp (haptikos) có nghĩa là cảm giác tiếp xúc, hay xúc giác. Ý tưởng về haptic có từ thập niên 90 nhưng phát triển muộn bởi việc mô phỏng tín hiệu xúc giác khá rắc rối. Máy tính dễ truyền đạt tín hiệu thị giác và thính giác nhưng lại gặp khó khăn với xúc giác. Người dùng xem được hình ảnh, gõ chữ bằng bàn phím, nghe âm thanh ở loa, nhưng không thể cảm nhận bằng xúc giác những gì đang xảy ra bên trong bộ máy. Sau nhiều nghiên cứu, thách thức được giải quyết nhờ phân tích thành phần của cảm giác “chạm”.
Khi chạm vào một vật bằng cử động có mục đích, cảm giác mà chúng ta nhận được gồm hai phần:
• Cảm giác tiếp xúc (tactile sensation): là cảm nhận ban đầu khi cơ thể tiếp xúc với vật thể, được cung cấp bởi dây thần kinh dưới da. Cảm giác này giúp nhận biết hình dạng, kết cấu bề mặt, nhiệt độ, rung động, ma sát… của vật thể.
• Cảm giác vận động (kinesthetic sensation): xuất hiện khi cơ thể dùng lực giữ và tác động lên vật thể. Cảm giác vận động cho biết trọng lượng vật, vị trí, phương hướng các lực và chuyển động tương đối của cơ thể so với vật.
Trên cơ sở hai thành phần của xúc giác, công nghệ haptic cũng tạo ra hai loại phản hồi xúc giác tương ứng là phản hồi tiếp xúc (tactile feedback) và phản hồi vận động (kinesthetic feedback). Hai loại phản hồi xúc giác được tạo ra đồng bộ nhờ hệ thống haptic, kết hợp với nhau, mô phỏng “cảm giác chạm” hoàn hảo.

Hệ thống haptic cơ bản gồm "thiết bị haptic" (haptic device) và "giao diện haptic" (haptic interface) kết nối với máy tính.
• Giao diện haptic: có các cảm biến ghi nhận thông tin về vị trí, tư thế, phương hướng, tương tác… của đối tượng, và có cơ cấu phản hồi xúc giác. Giao diện haptic có thể là màn hình cảm ứng hoặc ảnh ảo 3D.
• Thiết bị haptic: là trung gian giữa người dùng và giao diện, cho phép kết nối, thao tác và cảm nhận phản hồi từ giao diện xúc giác. Thiết bị có thể đeo trên người, đủ gọn để người dùng tự do thao tác.
• Máy tính: phân tích tình huống, điều khiển giao diện và thiết bị haptic tạo “cảm giác xúc giác” cho người dùng.
Hệ thống haptic có thể đơn giản chỉ gồm một màn hình cảm ứng, hoặc phức tạp hơn với vật thể ảo và các thiết bị đầu vào-đầu ra. Với hệ thống haptic có vật thể ảo (hologram haptic), quá trình máy tính tạo ra vật thể và môi trường ảo gọi là haptic rendering (dựng hình haptic).
Tái tạo cảm giác “chạm” không đơn thuần là tạo ra phản hồi vật lý. Quá trình đòi hỏi kiểm soát chặt chẽ mối tương quan giữa độ lớn với vị trí, vận tốc, lực tác động... lên các đối tượng.
Khi các đối tượng tác với nhau trên một hệ thống haptic, cảm biến truyền thông tin của đối tượng đến máy tính. Sử dụng thông tin thu thập, thuật toán phát hiện xác định tình huống tiếp xúc, mức độ và kết quả tình huống. Thuật toán phản hồi phân tích thành phần xúc giác có thể tạo thành, tính toán lực và vị trí cần tác động lên các đối tượng. Cuối cùng, thuật toán điều khiển kiểm soát thiết bị haptic thay đổi rung động, nhiệt độ, áp lực… để phản hồi xúc giác tương ứng với hình ảnh/môi trường mà máy tính tạo thành.
Mấu chốt là phản hồi xúc giác tạo ra phải phù hợp với chuyển động đầu vào của người dùng và tín hiệu thị giác, thính giác. VD: khi bàn tay người dùng nắm vào vật rắn ảo, lực nắm càng mạnh thì lực phản hồi do thiết bị haptic tạo ra phải càng lớn, vật thể ảo phải biến dạng và phát ra âm thanh thích hợp. Kết hợp với hình ảnh, âm thanh, haptic giúp đối tượng ảo hữu hình và thực tế hơn.
Loại xúc giác cơ bản nhất mà hệ thống haptic tạo ra là rung động. Thế hệ haptic đầu tiên thường sử dụng động cơ điện rung (như tính năng rung của điện thoại di động), nhược điểm là làm rung toàn bộ thiết bị. Các hệ thống haptic cải tiến cho phép tạo rung động ở vị trí cụ thể với tần số, thời gian, cường độ đáp ứng và các hiệu ứng xúc giác đa dạng hơn.
Hiện nay, haptic không chỉ tái tạo cảm giác tiếp xúc khi người ta tương tác với một đối tượng thật, mà bao gồm mọi tình huống phát sinh cảm giác “chạm”. Đối tượng thực hiện có thể là người, là máy móc, hoặc cả hai, và môi trường phát sinh tình huống có thể là thật, là ảo, hoặc kết hợp. Chẳng hạn, tương tác giữa người-máy, giữa người-vật thể ảo, tương tác người-đối tượng điều khiển từ xa, hoặc tương tác của robot.
Một số sản phẩm nổi bật dùng haptic hiện nay



| IPhone 6 với chế độ rung tinh vi và nhiều kiểu dao động cho các vị trí khác nhau trên màn hình. | | Hai người đeo đồng hồ Apple Watch có thể thu và gởi nhịp tim cho nhau bằng haptic. | | Áo khoác haptic KOR-FX giúp game thủ cảm nhận thế giới ảo, rung lên khi có vụ nổ, rát vai khi bị bắn… |
Ở dạng đơn giản nhất, một ví dụ về haptic là điện thoại di động có các nút ảo rung lên khi người dùng chạm vào. Các kỹ sư đặt các cảm biến điện áp nhỏ dưới màn hình và thiết kế màn hình có thể di chuyển một chút khi bấm nút. Cảm giác rung, màn hình chuyển động và âm thanh được đồng bộ hóa tạo cảm giác như nhấn vào nút thật. Mức độ cao hơn, haptic cho phép người dùng cầm, nắm, kéo, đẩy, cảm nhận và tương tác với cả vật thể ảo do máy tính tạo ra. Các nhà khoa học còn tìm cách chuyển giao xúc giác cho máy móc để chúng cảm nhận được môi trường và thao tác chính xác hơn.
Công nghệ haptic của Đại học Bristol: dùng sóng siêu âm tạo vật thể 3 chiều
có thể nhìn và cảm nhận được.
Haptic là tất yếu
Công nghệ haptic hiện còn hạn chế về hiệu ứng xúc giác và độ chính xác thời gian thực nhưng có tiềm năng ứng dụng rất lớn. Các game thủ trải nghiệm ngày càng nhiều cảm giác thực trong thế giới ảo là nhờ hệ thống haptic từ màn hình, cần và tay lái điều khiển. Giao diện các thiết bị cảm ứng cũng sẽ phát triển mạnh, thế hệ màn hình cảm ứng tương lai dự kiến sẽ làm hài lòng cả người khiếm thính, khiếm thị.
Nhưng ứng dụng hữu hiệu nhất của haptic là khả năng áp dụng vào trong các lĩnh vực y tế, quân sự, thiết kế công nghiệp và đào tạo. Haptic với khả năng truyền tải xúc giác, cộng hưởng hình ảnh và âm thanh sẽ trở thành công cụ tuyệt vời để học tập và tích lũy kinh nghiệm. Thử tưởng tượng người ta có thể chạm vào những vật thể siêu nhỏ như virus, hạt nano hay trải nghiệm tình trạng không trọng lực… Các bác sĩ thoải mái thực tập phẫu thuật trên mô hình ảo với cảm giác như thật về mạch máu, cơ bắp, khớp xương… Những người lính học cách tháo bom, lái máy bay, điều khiển xe tăng trong môi trường chiến đấu ảo an toàn. Thiết kế, thử nghiệm sản phẩm dễ dàng và ít tốn kém hơn nhờ các mô hình ảo như thật. Haptic còn song hành cùng thành công của lĩnh vực tự động hóa. Chúng ta sẽ sớm được trải nghiệm cảm giác cầm, nắm và sử dụng một viên đá trên mặt trăng chỉ bằng cách điều khiển robot từ xa. Tương lai haptic đang trong tầm tay với những tiến bộ đầy hứa hẹn.

Chơi game. | | 
Thực hành phẫu thuật như thật trên ảnh ảo. |
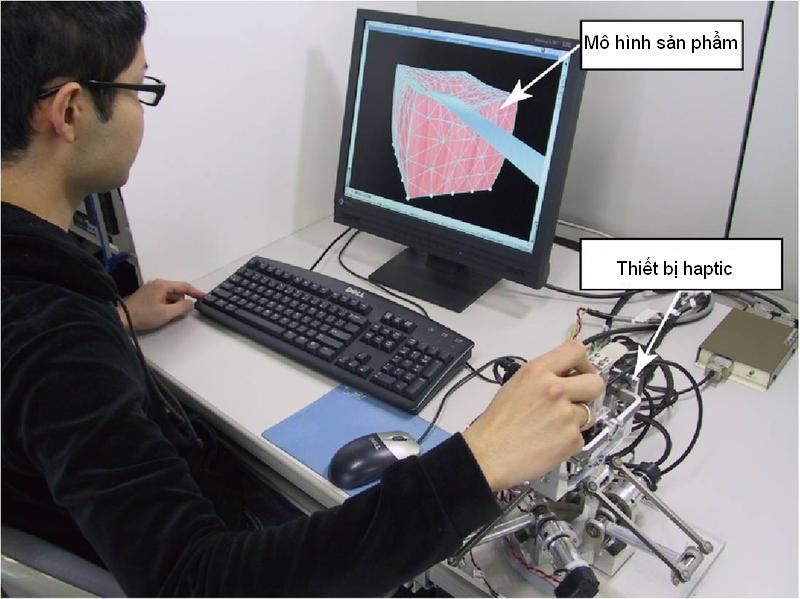
Thiết kế sản phẩm bằng haptic. | | 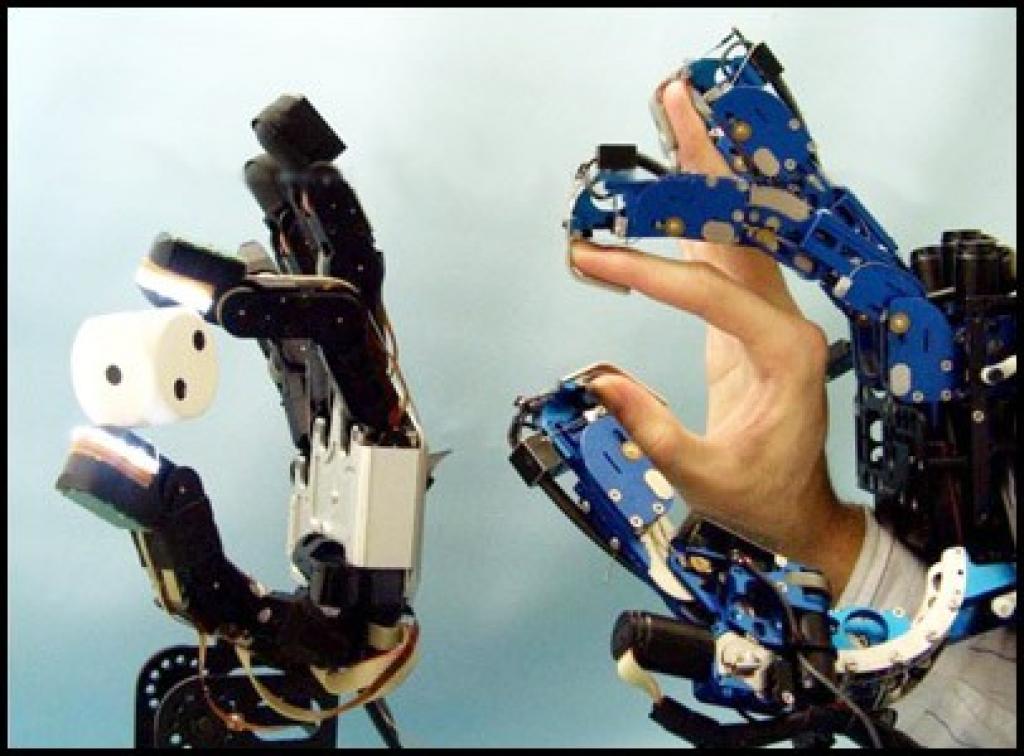
Người điều khiển bàn tay robot haptic của NASA cảm nhận được vật thể robot đang cầm. |
MINH THẢO, STINFO số 1&2/2015
Tải bài này về tại đây.